Security●●●Banger
MVAR – Deterministic sink enforcement for AI agent
IFC + capabilities block prompt injection at execution sinks, not input filters—40yr research applied.
Big BrainWizardry
ShawnC21
113mo ago
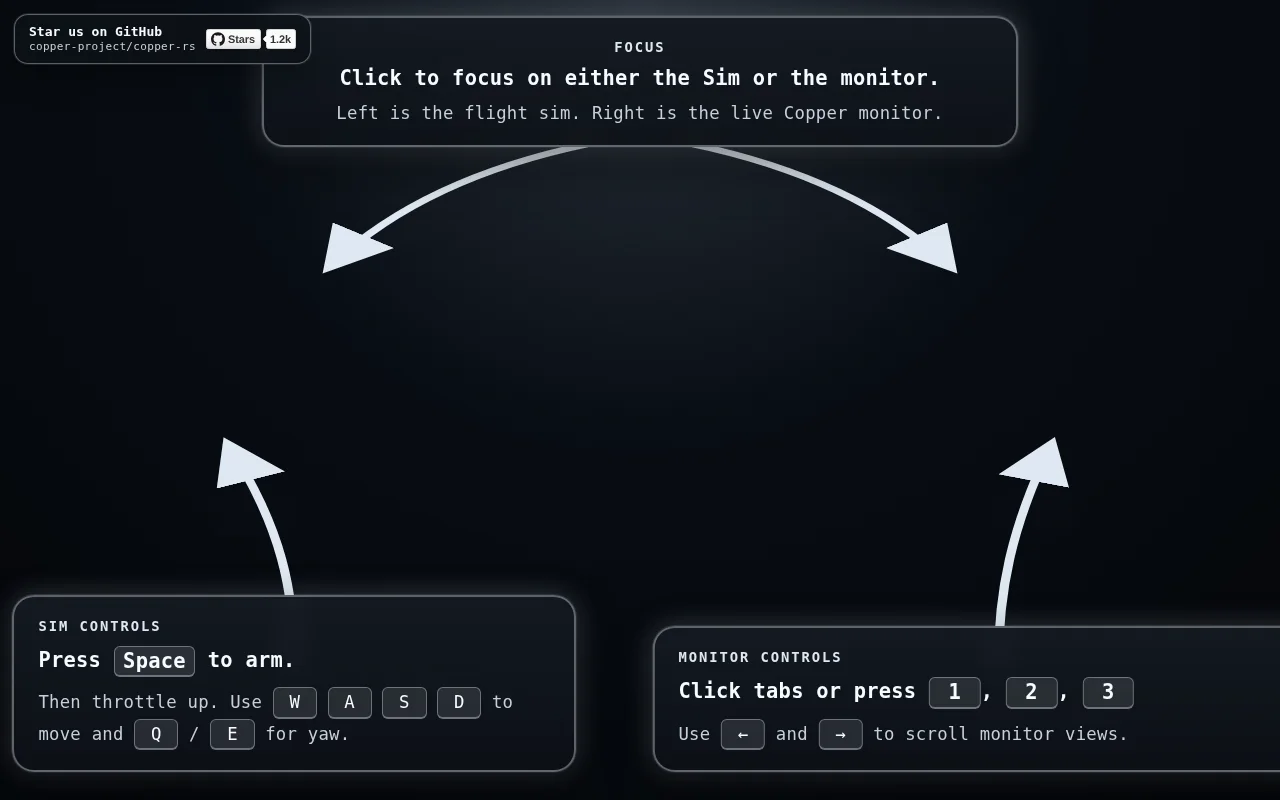
Rust robotics runtime running deterministically in WASM and on STM32 microcontrollers.
Robotics engineers, embedded developers
ROS · Webots · Crazyflie
The runtime comes from copper-rs, an open-source robotics runtime written in Rust for deterministic workloads. While robotics stacks are often tightly coupled to specific OS distributions and environments, here, the same code runs on microcontrollers (for example this flight controller also compiles for STM32H7 and flies real drones) as well as on desktop OS targets like Linux, macOS, and Windows.
The simulator is built with Bevy.
The monitoring interface is built with ratatui, mapped to a Bevy surface in the browser (normally it runs in a real terminal).
IFC + capabilities block prompt injection at execution sinks, not input filters—40yr research applied.
10K flights in 3.5MB WASM bundle is impressive constraint engineering for browser rendering.
VLCs over VLAs: LLMs write Python code against live robots instead of predicting actions.
Rust-to-Wasm pipeline is technically sound, but 'AI OS' branding feels like marketing fluff.
Reimplementing Go runtime in Rust for browser execution is ambitious.
Verifiable decision replay for autonomous systems, but execution complexity limits adoption beyond safety-critical domains.